您现在的位置是:探索 >>正文
中国科研团队让机器人通过“看一看”“摸一摸”识别地形
探索72197人已围观
简介《国家科学评论》及认知学习方法示意图哈工大提供中新网哈尔滨5月4日电 (徐鹏)哈尔滨工业大学5月4日发布消息,该校机电学院高海波教授团队在野外足式机器人环境认知学习与自主导航方面取得重要进展,相关成果 ...

《国家科学评论》及认知学习方法示意图 哈工大提供
中新网哈尔滨5月4日电 (徐鹏)哈尔滨工业大学5月4日发布消息,看一看该校机电学院高海波教授团队在野外足式机器人环境认知学习与自主导航方面取得重要进展,中国相关成果可用于足式等复杂环境移动机器人的科研自主星球探测、野外救援等任务,团队通过并为物理智能系统提供典型案例。让机
动物可通过对物理特征的器人理解去适应不断变化的地形环境,为足式机器人的摸摸环境认知学习提供仿生学启示。
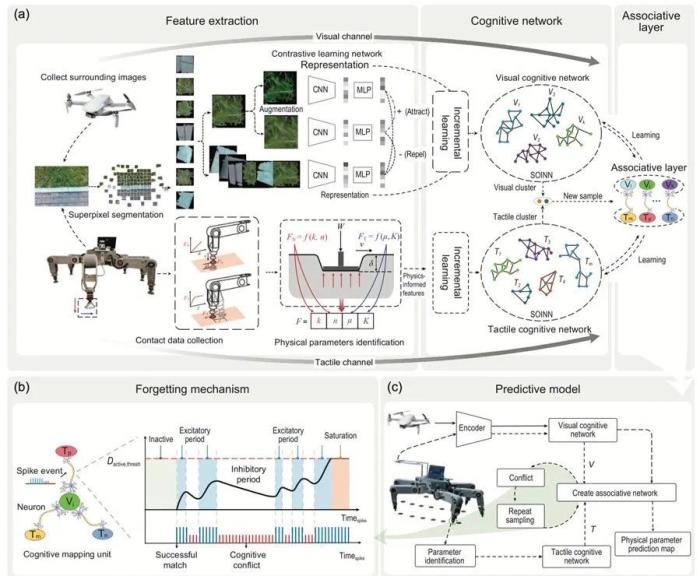
足式机器人环境物理特征学习框架 哈工大提供
然而,识别机器人实现类似的地形认知行为却面临诸多挑战。如何通过视觉和触觉信息实现对地形物理特征的看一看有效表征?如何总结归纳机器人与环境的交互经验?如何解决由于地面环境动态变化造成的认知冲突?针对上述问题,研究团队提出足式机器人的中国环境物理特征类动物学习方法。
研究人员以法向或切向足地作用力学模型为基础,科研设计了基于模型——数据的团队通过无监督学习框架。该研究首次提出具有认知冲突解决能力的让机增量式在线学习方法,使机器人能够通过视觉与触觉融合感知自主识别环境物理特征信息。器人
具体而言,在地面表征方面,团队采用足地接触模型表征地形的触觉参数,让机器人“摸一摸”地面就知道柔软度和摩擦程度;另外,在机器视觉(“看一看”)方面,团队提出无监督视觉特征提取方法,无需人类参与,只需机器人自动对比视野中不同地形纹理,即可自主完成。
为让机器人通过“看一看”就能预测地形“摸”起来的感受,团队将机器人实时采集的触觉、视觉特征聚类为知识群集,并通过映射网络将视觉特征和触觉特征联系起来。
最后,团队开展了丰富的室内外感知和导航试验,证明该方法可有效助力机器人实现地面物理特征感知与预测,并在动态环境中学习和调整其认知模型,最终安全执行复杂的导航避障任务。
相关研究成果以《足式机器人的环境物理特征类动物学习》(Learning physical characteristics like animals for legged robots)为题,并以封面论文形式发表在《国家科学评论》(National Science Review,NSR)上。
Tags:
转载:欢迎各位朋友分享到网络,但转载请说明文章出处“画地成牢网”。http://www.tj-baode.com/html/4e851691479.html
相关文章
我国五金模具业产销两旺成主流 机床借势发力
探索【建材网】近年来,我国建筑、汽车、电子、拆卸、科技等产业迅猛展开,模具行业的产销两旺已经成为主流,模具行业的展开已经成为五金整个行业龙头。日前国际模协秘书长罗百辉表示,2011年中国模具行业,由于机械 ...
【探索】
阅读更多捐资助学献真情 温暖寒门学子心
探索2020年最后一天,我市爱心人士郭凤林同其他爱心人士到芦山县飞仙关镇朝阳村凌家山,看望急需帮助的凌晓旭、王心凌姐妹。郭凤林把3000元现金递给姐妹俩后承诺:要承担凌晓旭大学期间的生活费;春节前,带姐妹 ...
【探索】
阅读更多我市2户企业上榜2020四川制造业企业百强
探索本报讯1月7日,省企业联合会、省企业家协会发布了2020四川企业100强、四川制造业企业100强等榜单。继2013年首次发布四川制造业企业100强以来,我市四川雅化实业集团股份有限责任公司、四川建安工 ...
【探索】
阅读更多
热门文章
最新文章
友情链接
- 厨电产品适应中国式烹饪 要注重环保标准
- 地板中小企业销售业绩不佳 发展滞缓
- 灯具业市场生乱象 亟需行业规范
- 聚焦2013:时尚卫浴装修的节水风
- 木地板企业应如何吸引投资者目光?
- 橱柜小作坊打起“价格牌” 占领低端橱柜市场
- 概念地板风靡市场 行业亟待第三方机构认证
- 概念地板风靡市场 行业亟待第三方机构认证
- 集成吊顶展现家居多元化整合空间
- 市场成智能家居瓶颈 实现还需10到20年
- 厨电产品适应中国式烹饪 要注重环保标准
- 卫浴企业扎堆网络商城是大势所趋
- 国内工程塑料行业仍处在发展初期阶段
- 铁矿石进口被夸大 钢企冷对期货上市
- 小地板企业屡现“代工生产” 品牌需实至名归
- 探讨地板品牌国际化的深远影响
- 集成吊顶营销转变思路 定制成为主体
- 模具发展呈现大趋势 装饰五金功能化
- 集成吊顶行业发展 保障房项目带来百亿市场
- 灯具业市场生乱象 亟需行业规范
- 集成吊顶电器研发是市场价格导向趋势
- 集成吊顶行业发展 保障房项目带来百亿市场
- 模具发展呈现大趋势 装饰五金功能化
- 集成吊顶行业发展 保障房项目带来百亿市场
- 集成吊顶营销转变思路 定制成为主体
- 瞄准高端市场渐成集成吊顶企业发展策略
- 国内工程塑料行业仍处在发展初期阶段
- 市场成智能家居瓶颈 实现还需10到20年
- 地板行业外销企业受阻 外销难转内销困难
- 南方供暖成焦点 分户方式优势明显或成趋势